If you have many toy quads or if you are into Silverware, you probably know about or even use the IRX6 or MTX9D multiprotocol modules.
These modules allow you to bind to and control many toy quads. And they’re quite cheap. But they have a major limitation: poor range. So we will build a better but still-affordable NRF24 multiprotocol module.
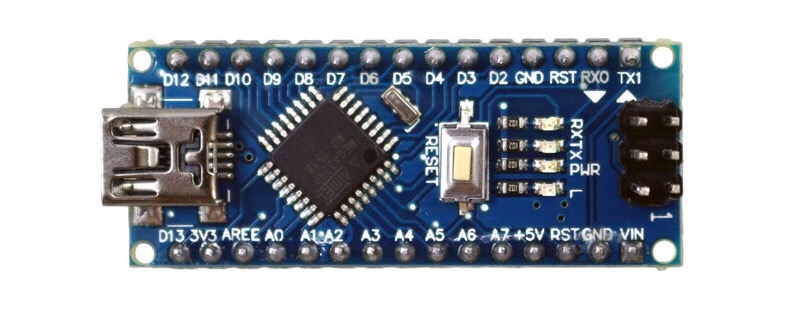
You will need an Arduino Nano to control the RF module.
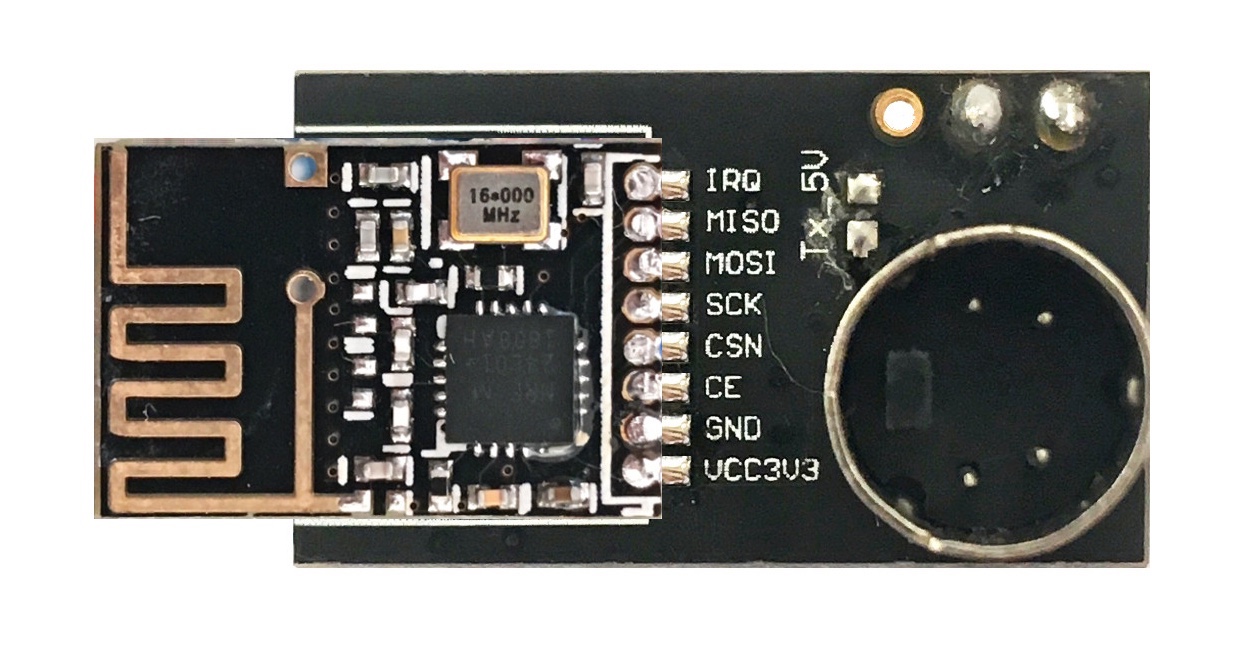
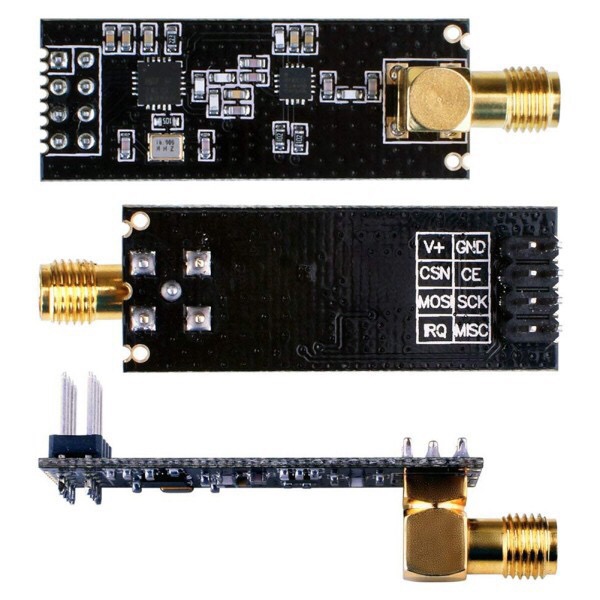
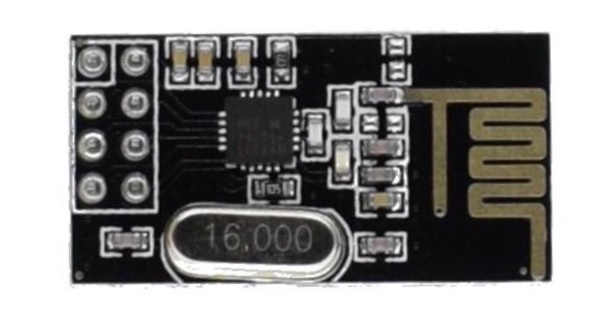
You will also need an NRF23L01+PA+LNA RF module. PA is power-amplifier and LNA is low-noise amplifier
But the most important component is the excellent NRF24 multiprotocol firmware for the Arduino by Goebish. This project wouldn’t have been possible without his firmware and his help and guidance. Thanks, Goebish!
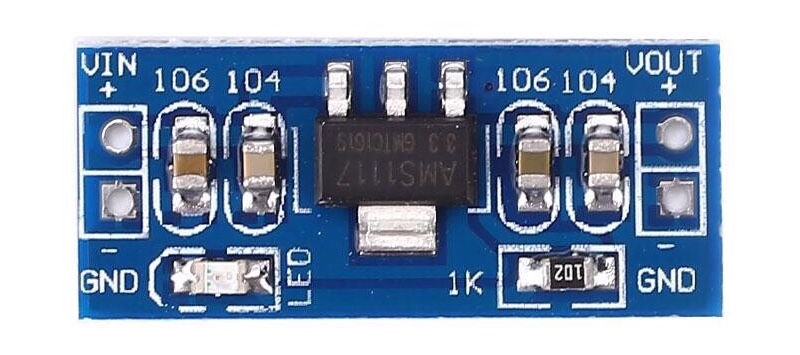
Additionally, the 3.3V out pin of the Arduino nano does not have enough power for this RF module so you will need a separate 3.3V power module to power the RF module
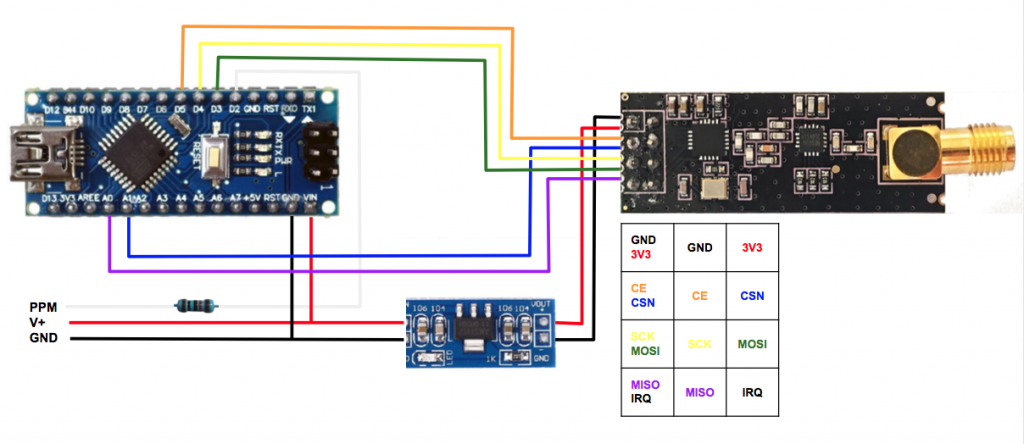
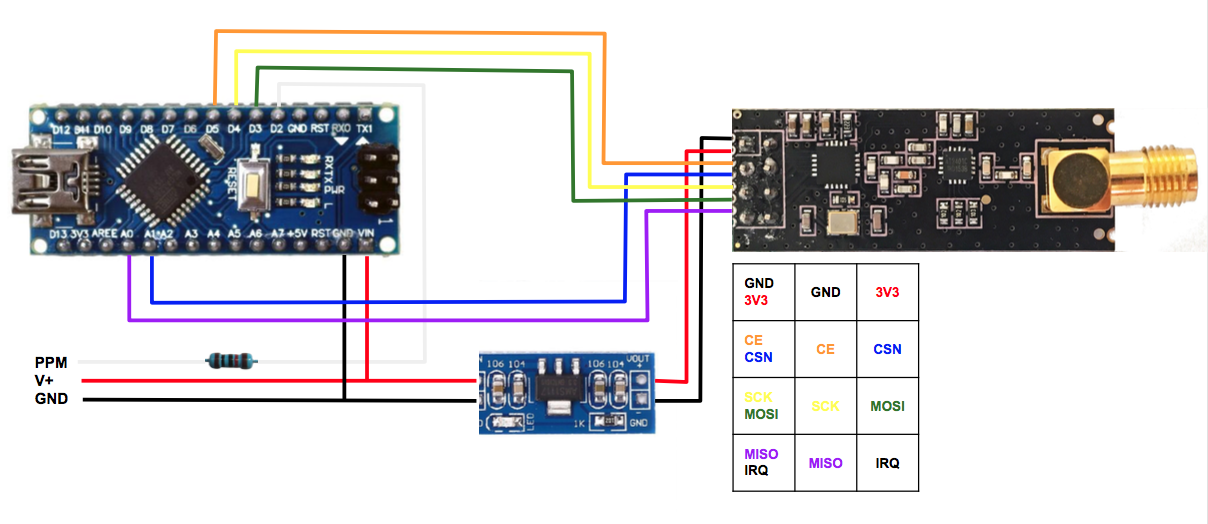
Finally, the PPM signal voltage output from some transmitters may be too high for the Arduino Nano, so to be safe you need a 10k ohm resistor in-line with the PPM signal wire. This give you input voltage protection up to +15.5VDC and down to -10.5VDC. More info here.
- Wire according to the diagram below.
- Upload the NRF24 multiprotocol firmware to the Arduino Nano.
- Connect the power, ground, and PPM lines to your TX.
- Create a model on your TX with PPM output
- While holding the appropriate stick pattern, power up your TX. Last used protocol is automatically selected if stick is in neutral position so there’s usually no need to do this every time.
- Release the stick(s).
- Arm if necessary
- Fly!
{kind=link}
That’s it. You now have a budget multiprotocol module with longer range.