 The Kingkong Smart100 is a good and popular brushed micro quadcopter. However, the big 8.5x20mm motors have a tendency to burn the MOSFETs if you fail to cut the throttle during crashes.
The Kingkong Smart100 is a good and popular brushed micro quadcopter. However, the big 8.5x20mm motors have a tendency to burn the MOSFETs if you fail to cut the throttle during crashes.
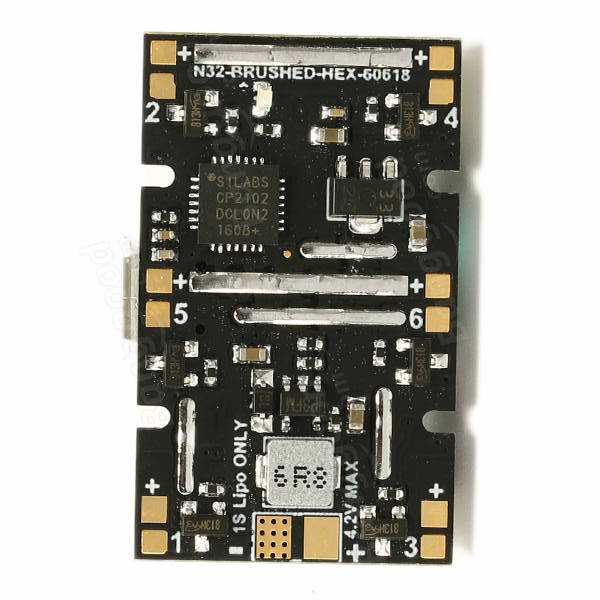
Luckily, it has a hexacopter board. This means you have two extra MOSFETs you can extract and use to replace a burnt one. But it’s far easier to just solder the motor on the motor pad with the burnt MOSFET to one of the spare motor pads and configure the board with a custom motor mix. For example, if you burnt the MOSFETs of motors 2 and 4 and you want to transfer them to motors 5 and 6.
On the Betaflight (or Cleanflight) CLI, we’ll check the motor mix configuration for a quadcopter:
mmix load quadx
The QUADX motor mix configuration will be shown:
Loaded QUADX
mmix 0Â 1.000 -1.000Â 1.000 -1.000
mmix 1Â 1.000 -1.000 -1.000Â 1.000
mmix 2Â 1.000Â 1.000Â 1.000Â 1.000
mmix 3Â 1.000Â 1.000 -1.000 -1.000
Note that motor 1 is mmix 0, motor 2 is mmix 1, and so on. So for motors 2 and 4, we’re looking at mmix 1 and mmix 3. The 4 numbers after the motor number is the “action” of that motor.
What we want to do now is to remap the “action” settings of motor 2 and 4 (mmix 1 and 3) to motors 5 and 6 (mmix 4 and 5):
# remap the settings of mmix 1 and 3 to mmix 5 and 6
mmix 4 1.000 -1.000 -1.000Â 1.000
mmix 5 1.000Â 1.000 -1.000 -1.000
Finally, we clean up the settings of mmix 1 and 3 to avoid confusion
# clean up settings of mmix 1 and 3
mmix 1 1.000 0.000 0.000 0.000
mmix 3 1.000 0.000 0.000 0.000
That’s it!