The Ultrapower UP-S6AC is the bigger brother to my favorite charger, the Ultrapower UP-S6AC. It is bigger than the UP-S6 because the AC adapter is built in. You just plug in straight to the power 100-240V outlet. But you still retain the capability to charge with a 2-4S LiPo (7-17V). It has 6 ports capable of Micro Losi, Molex PIcoblade/MCX, JST-PH/MCPX, and JST-RCY.
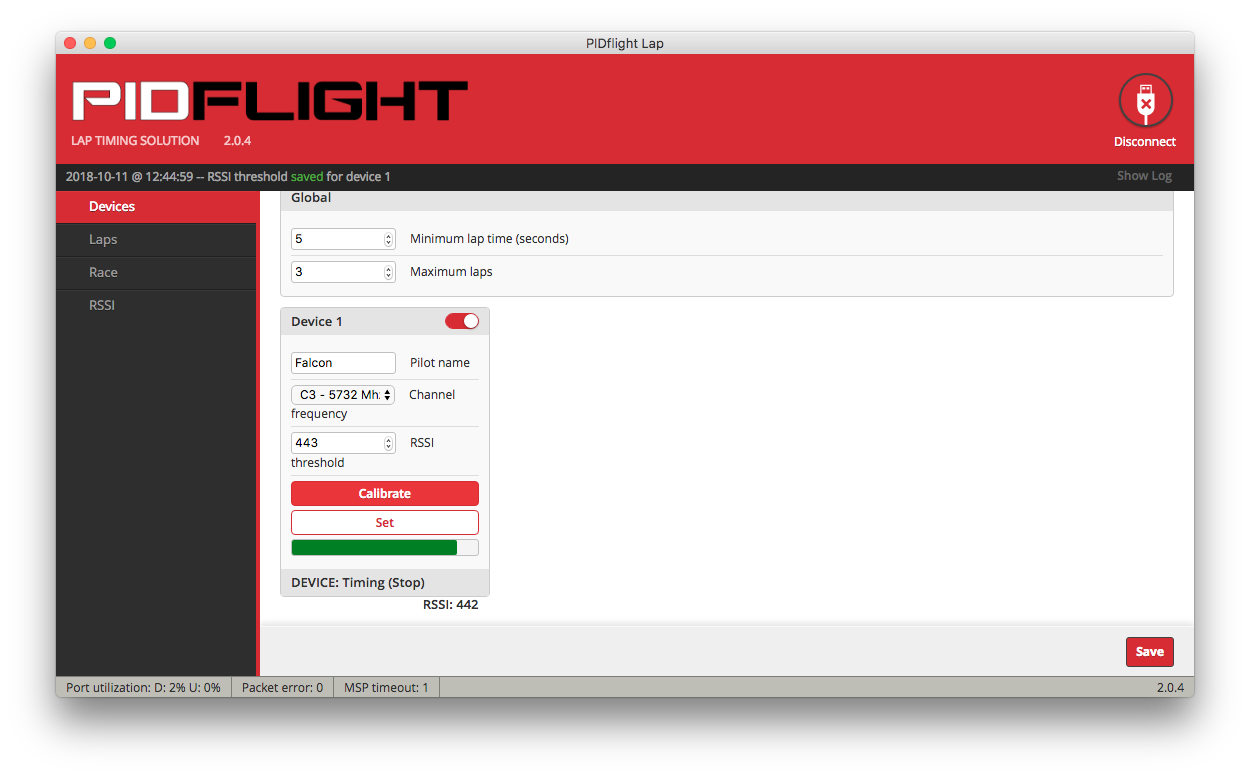
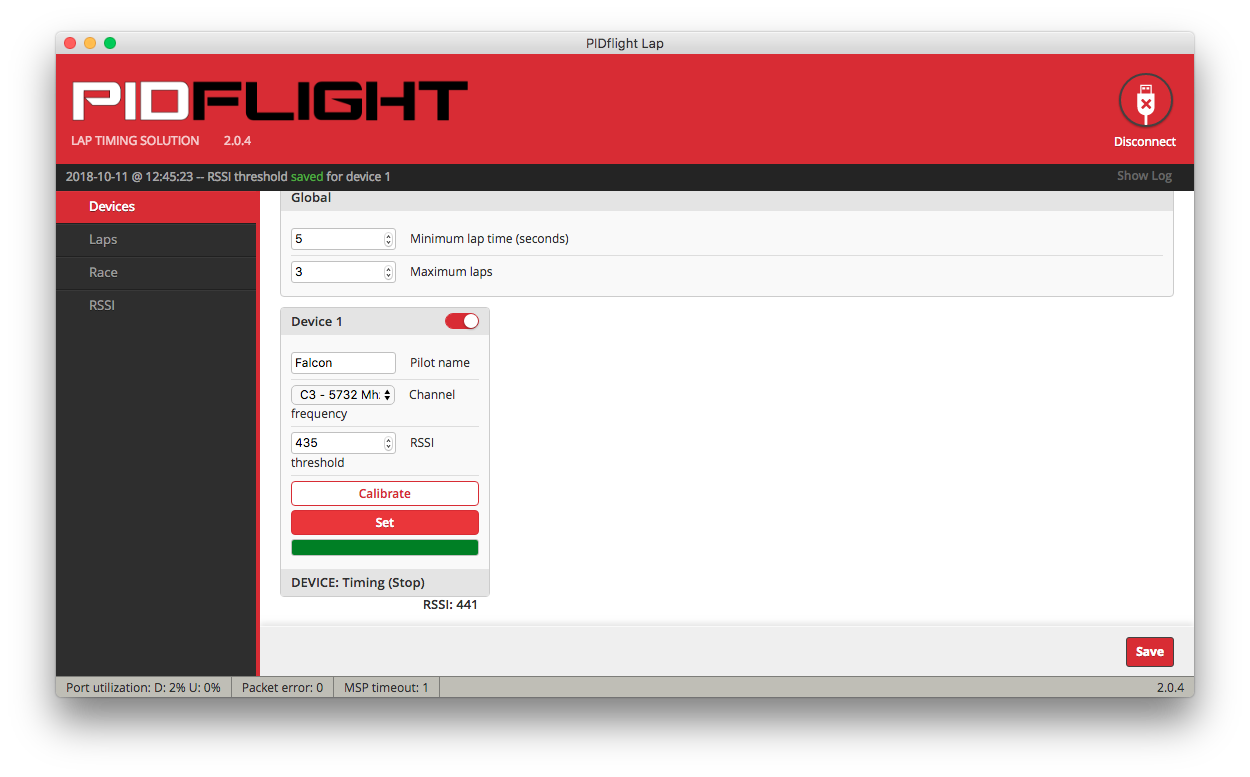
You use the “Select” button to select the setting you want to change and the “Setting” buttons to select the value for the setting. Then you press and hold the “Select” button to save the settings.
Comparing the UP-S6AC and the UP-S6, you can see that there’s a substantial difference in size as well as weight. So it would seem that the UP-S6AC is primarily for home use and then you can use it occasionally on the field. The UP-S6 is primarily for the field and but you can charge occasionally at home.
{kind=link}
{kind=link}