
Parts and Equipment
For this build, I used the following:
- Rakonheli 66mm Brushless Whoop frame
- Rakonheli 31mm 1mm shaft 3-blade clear propellers
- X-Racer X-1 frame
- Teeny1S F4 Flight Controller with Teeny1S 4-In-1 6A ESC
- Flysky RX2A Pro Receiver
- Turbowing Cyclops 2 5.8G 48CH 25mW VTX
- Kingkong 800TVL 150 degree FOV camera
- Racerstar BR0703 Racing Edition 15000KV Motors
- Soldering iron
- Soldering wire
- Desoldering pump
- Flux
- Wire snips
- Double-sided tape
Build Procedure
- Remove the camera mount and the canopy pins from the donor X-Racer X-1 frame
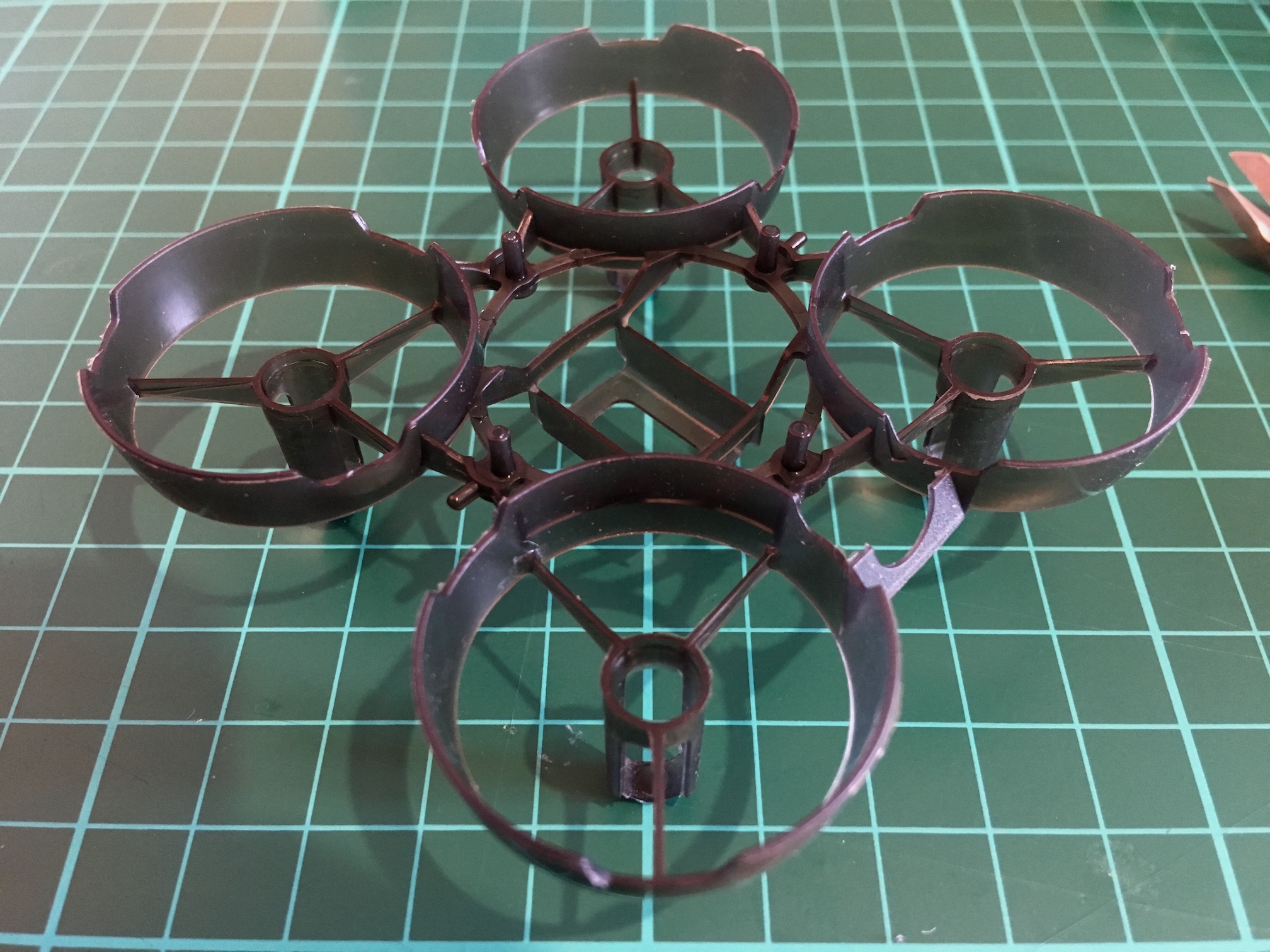
- Assemble the frame. There are lots of tiny screws of different sizes. A vernier caliper will come in handy

- Lay out the FC and the ESC. Ignore the standoffs and screws included in the FC and ESC package and use the screws included with the Rakonheli frame kit.
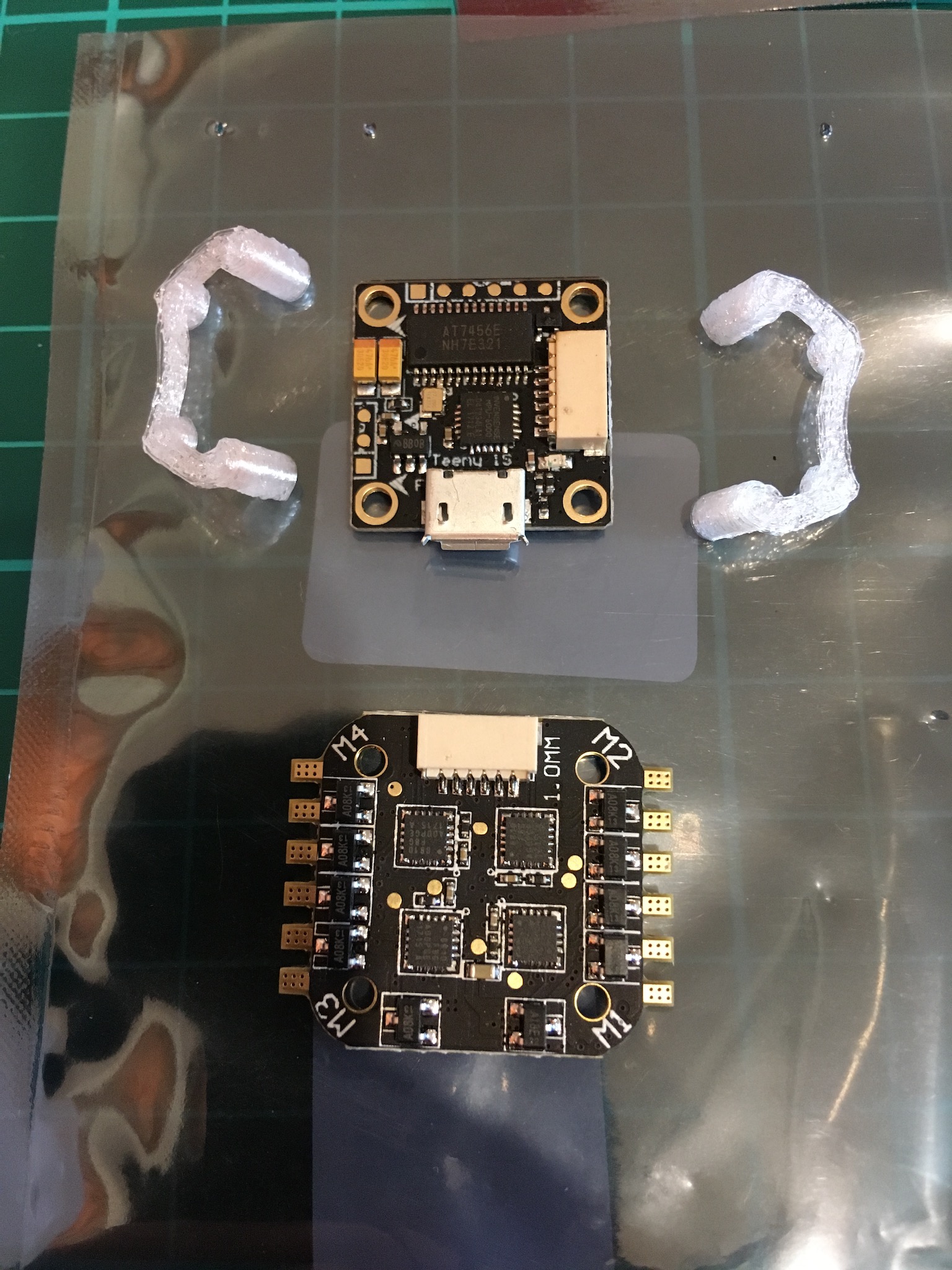
- Plug in the FC-to-ESC harness and assemble the FC and ESC stack.

- Review pad layout
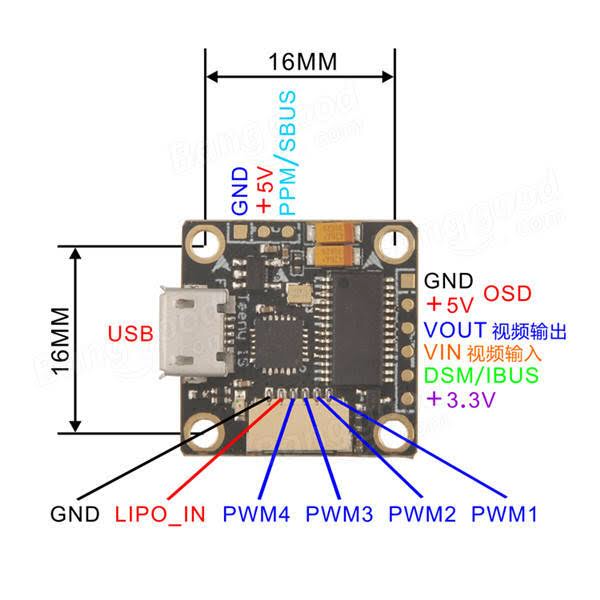
- Solder the RX wires to the FC

- Solder the AIO camera wires to the FC.
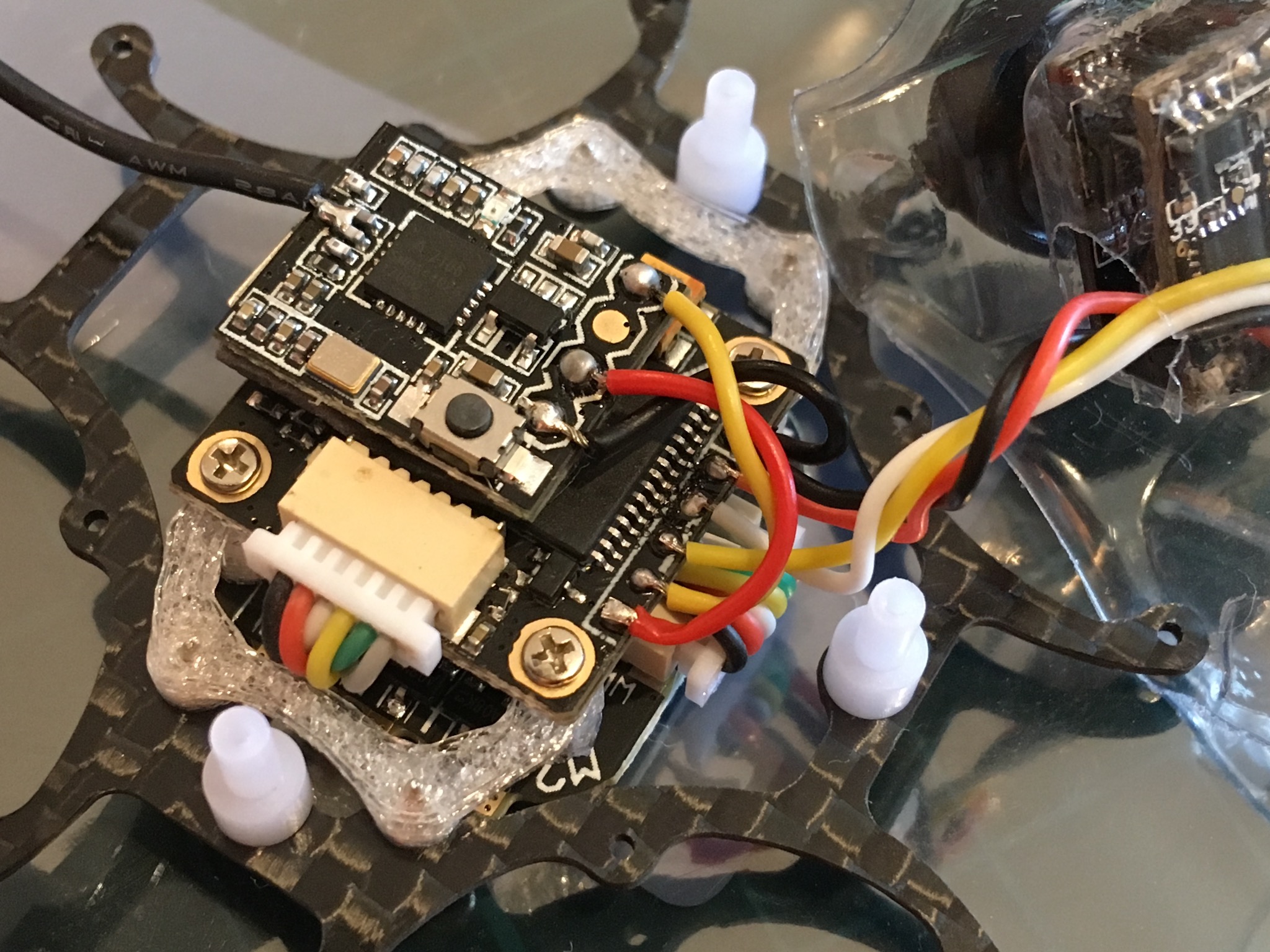
- Mount the stack onto the frame
- Mount the motors. Ignore the screws included with the motor package (which are too long) and use the screws included with the Rakonheli frame kit.

- Pre-tin the battery pads and solder in the battery connector pigtailÂ
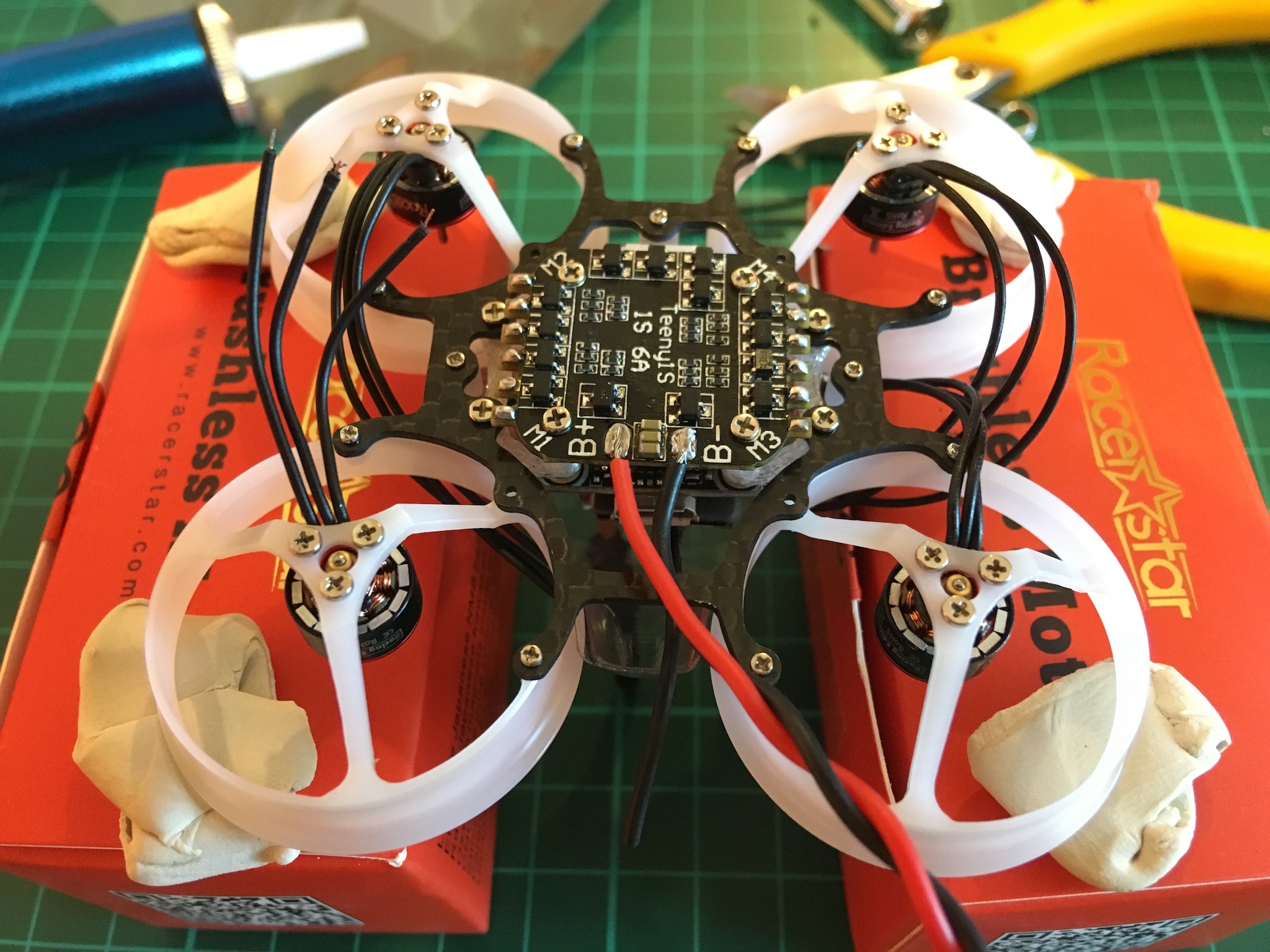
- Pre-tin the ESC pads and solder in the motors wires to the ESC pads
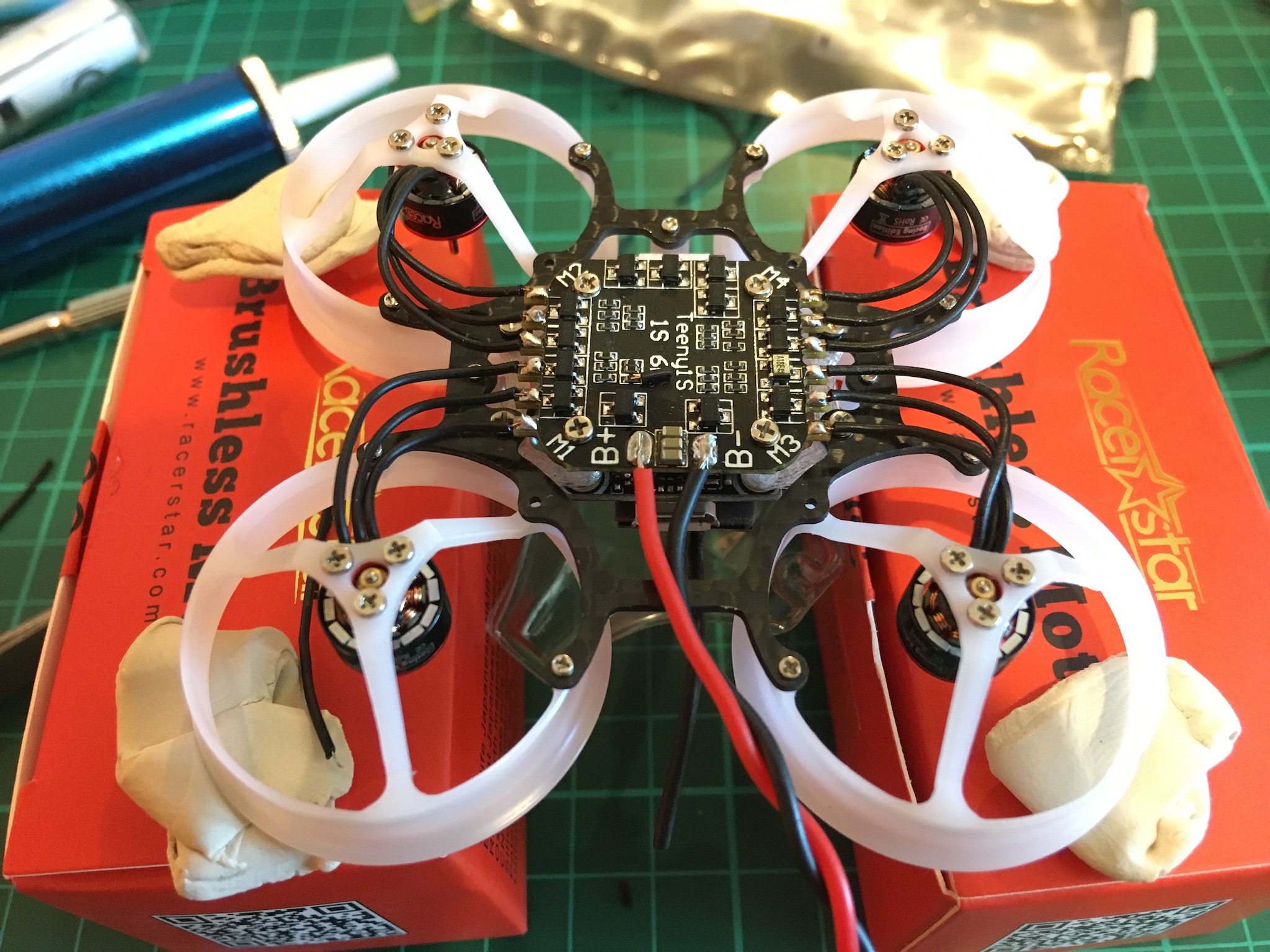
- Once all soldering is done, check continuity between B+ and B- with a multitester. There should be NO continuity.
- Cross your fingers, plug-in the battery and check for magic smoke
- Install the props
- Done!
